先日、2足歩行式のロボットを作りましたが、
今回は4足歩行ロボットを作ってみました。

<作り方>
①
木板、アイス棒を使って材料を切り出し、
ドリルで穴あけ、マジックで色を塗っています。
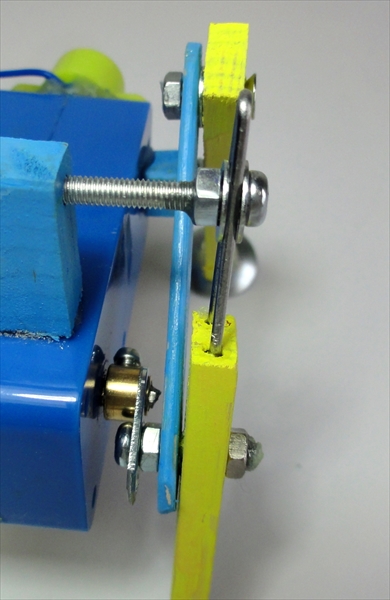
下の黄色いものが脚になります。
左が前脚で、幅1cm厚さ5mmの板を使用し、
上部に針金を曲げて差し込み、下部は傘釘の傘の部分をネジ留めしています。

②
クランクはタミヤの「クランク金具」を使用。
中心から1つ目の穴を使用するため、少し切断しました。

③
ギアモーターはこれを使いました。
(リンク切れになっていたら「DC1.5-6V ギアモータ」あたりで検索してみて下さい。)
送料込みで200円以下で購入出来ます。(届くまでに2~3週間かかります。)
②のクランクの中心から一つ目の穴に
M3×15mmの小ねじをナットで締めます。
ギアモーターのシャフトを少し切断し
クランクをシャフトにネジ留めします。

④
①を③に組み立てていきます。

頭に通しているものはM3×60mmの小ねじです。
それぞれのパーツは軽く動く程度にナットを調整し
ナットは走行中にゆるまないように、接着剤でネジに固定しています。
前側
後ろ側

目の部分はキャンドゥのジャンボビーズを利用しました。
緑色のLEDを並列接続にし、
針金を芯棒として、アルミ針金を巻きました。

今回の装置は単3乾電池1個使用のため、
このままではLEDは点灯しないので、
で点灯させています。
基板とコイルを背中に貼りました。

スイッチはダイソーの商品から取っておいた
プッシュ式スイッチを使用し、
しっぽの代わりにしました。

プッシュ式スイッチを使用し、
しっぽの代わりにしました。

これで完成で~す!!

ビデオで撮ってみました。
BGMなしだと、ぎこちない動きにしか見えないですが
BGMをオンにして見て頂くと、それなりに見える気がします。
BGMなしだと、ぎこちない動きにしか見えないですが
BGMをオンにして見て頂くと、それなりに見える気がします。
4足歩行ロボットは、㈱イスペットのこちらの作品を参考に作ってみました。
とても楽しい工作で、参考になります。
返信削除4足歩行メカ、子供たちの科学クラブで作れるのではないかと思います。
質問が1つあります。
後ろ足の取り付け方法、説明・写真があると良いのですが、どのように取り付けるのか教えていただけませんでしょうか?
他は、写真と説明で問題ないと思います。 よろしくお願いいたします。
茨城県龍ヶ崎市 近藤典明 kondoh28@mth.biglobe.ne.jp
090-4927-9580