鉄の壁をのぼる「Climbing robot」を作ってみました。
両側の車輪にネオジム磁石を4個ずつ取り付けて、鉄の壁に貼り付く仕組みです。
両側の車輪にネオジム磁石を4個ずつ取り付けて、鉄の壁に貼り付く仕組みです。

Youtubeの「How to make a wheg climbing robot at home」
(Brainergiserさんの作品)を参考にしています。
Brainergiserさんの作品との違いは
車輪の素材&磁石、尻尾に磁石をつけたところ、目を付けたところ等です。
①
車輪は12mmの角材で作りました。

②
車輪に付ける磁石は、ダイソーの13mmφのネオジム磁石を
クリアファイルに入れ、テープで留めています。

③
ttギアモーターの軸の形状に合うように穴をあけて、

④
③を①の中心にネジ留めしています。

⑤
ttギアモーターの上下に薄い板を取り付けました。

⑥
下側に6mm×3mmのリング磁石3個をアルミ針金に通して
取り付けたのですが、
取り付けたのですが、

いざ動かしてみると、安定性が悪かったので
12mm×3mm(穴4mm)のリング磁石3個を、
アルミパイプ+木材でしっかり固定しました。

⑦
目はダイソーのループエンド(手芸品)に青色LEDを入れています。
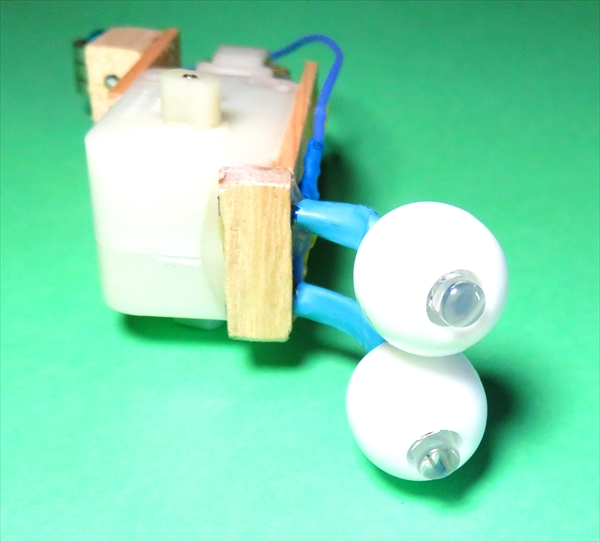
⑧
目には100Ωの抵抗を入れ、
電源は250mAhのリポパックで配線しました。
リポパック(リチウムポリマーバッテリー)は、
取扱いを間違えると火災や怪我の危険性がありますので、
取扱には十分な注意が必要です。
もしこれを見て、作って下さる方は こちら ↓ の注意事項をご確認ください。

⑧に④を取り付けたら完成です。

ギア比の違うttモーターを使って2体作ってみました。
左は1:120、右は恐らく1:400くらいありそうな感じです。
左の方がかなり速く走ります。
右はトルクが大きいので、安定した動きです。

このオリに入れておくと、勝手に歩き回ってくれます。
実は、このロボは なかなか真っ直ぐに歩行してくれず、
苦肉の策として、このオリを作りました。
実は、このロボは なかなか真っ直ぐに歩行してくれず、
苦肉の策として、このオリを作りました。

ロボは左と右で、尻尾の長さ&角度を変えました。(赤丸部分)
左のロボの尻尾がもう少し長いと、オリの左上の角を曲がるときに時々 落下します。
右のロボの尻尾がもう少し短いと、オリの右上の角を曲がるときに時々 落下します。
(5回に1回くらい)

尻尾の長さ&角度で落下防止になるとわかったときは
嬉しかったです♪ 今回の一番の工夫点 (笑)
理由はよくわからないですが、
トルクの大きさ、磁石を引き離すタイミングや
重力バランスなど関係しているかも知れません。
実は目はつけない方が、落下しにくいのですが、
出来れば付けたかったので・・・(^^;
速く歩くタイプ、遅く歩くタイプともにビデオに撮ってみました。