以前、「2足歩行ロボ」や
「方向転換する2足歩行ロボ」
を作りましたが
今回はこれらをリモコンで動くようにしてみました。

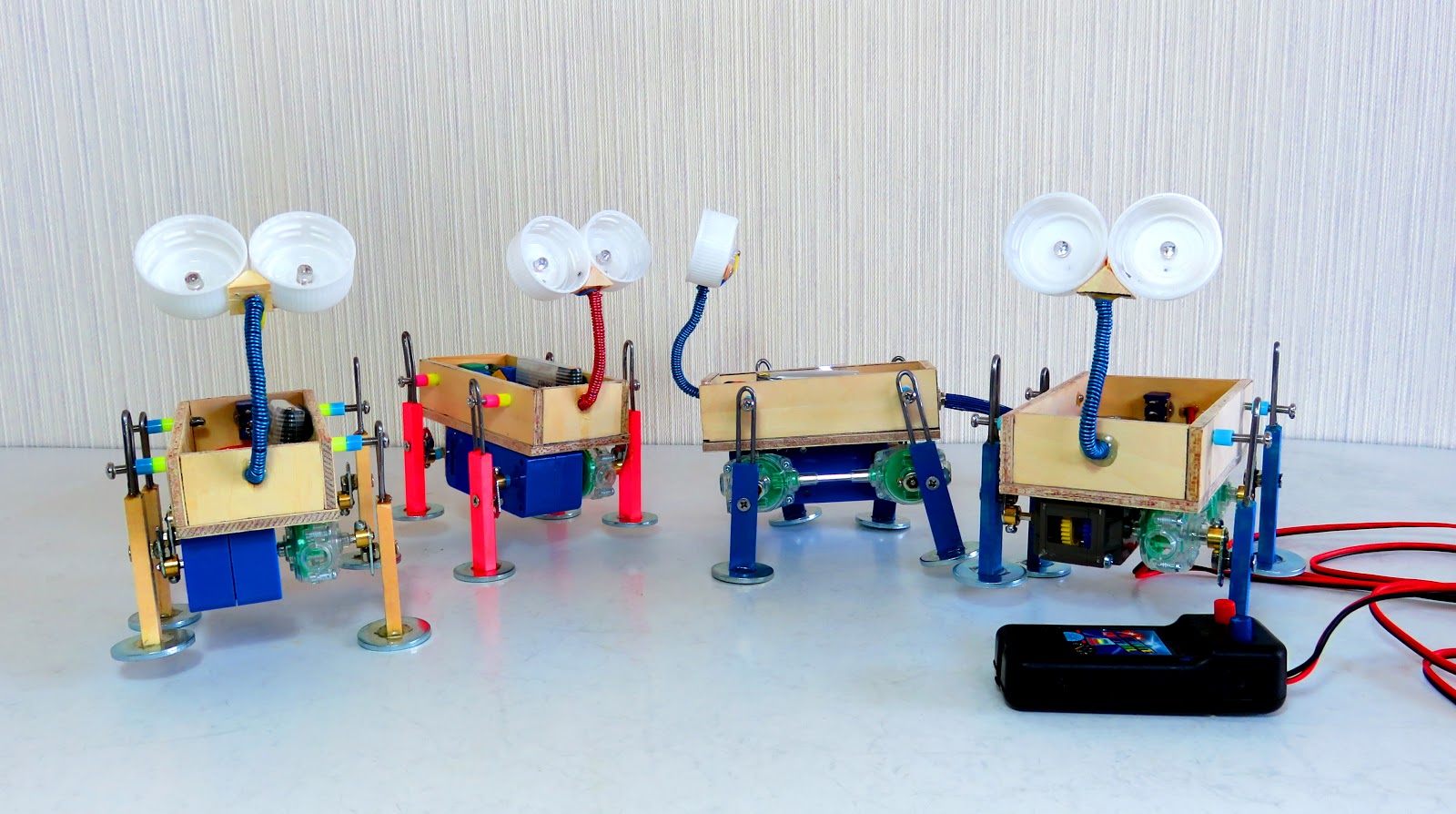
①1番右と左が、100均のリモコンカーを使ったもの (有線)
②左から2つ目が、前後のみ動くラジコンを使ったもの(無線)
③右から2つ目が、前後左右に動くラジコンを使ったもの(無線)
①100均のリモコンカー使用
歩行時にコードが邪魔になるので、斜め後ろにいくようにしています。
電源は手元スイッチのところの単3乾電池2本です。

②前後のみ動くラジコン使用
このようなラジコンカーから取り出した基板をロボに貼り
無線で歩かせます。


前部に貼ってるのが、ラジコンカーから取り出した基板です。

電源は単3アルカリ乾電池3本直列です。

③前後左右に動くラジコン
数か月前にダイソーでこのようなR/Cカーを購入しました。
車の中には 前後に走らせるためのモーターと、
左右に旋回させるためのモーターの
2つが内蔵されています。
車の中には 前後に走らせるためのモーターと、
左右に旋回させるためのモーターの
2つが内蔵されています。


ロボでは足元に取り付けたモーターを回転させることで
方向転換する仕組みです。
モーターは車に付いていたモーターではなく、
もう少し小さくて回転速度の速いモーターにタイヤを付けて使用しています。
モーターは車に付いていたモーターではなく、
もう少し小さくて回転速度の速いモーターにタイヤを付けて使用しています。

方向転換用のタイヤが地面に軽く接したときにクルッと回ります。
・左足が浮いてるときはモーターは回転しますが、
タイヤが地面に接してないので、ロボは回りません。
・左足が真下に来たときは
タイヤが地面に強く接触するため、トルク不足でモーターは回りません。
・軽く接するときのタイミングにより回転する角度が変わります。
背中の上の方の緑のものが、R/Cカーから取り出した基板です。
下の方は、電源(850mAhのリポパック)です。

有線方式のリモコンを使って、
方向転換するロボを作ってみたのですが、
線が邪魔になって、あまり良くなかったです。
上の3種類をビデオで撮影してみました。
どのロボも前進するときのみ、目が光ります。
どのロボも前進するときのみ、目が光ります。
最後の方向転換するロボは、走らせる場所の素材によっても
方向転換しやすさが変わるようです。
当初、紙の上で走らせると、回転の仕方が悪かったのですが
木の机の上で走らせると
よく回転するようになりました。
2017年9月24日(日) 13時~16時
「サイエンスヒルズこまつ」のエントランスで
「身近な材料から生まれたおもちゃ」として
この2足歩行ロボをはじめ、20数種類のおもちゃを持って行こうと思っています。
お近くの方、見に来て頂けると嬉しいです♪
https://science-hills-komatsu.jp/wp/event/robot201709/
これ以外の実験や工作も掲載していますので、
こちらも見てみて下さい。