先日、機構について調べていたところ、
大変興味深いサイトを見つけました。
まるで、人が壁を押してるようなこの姿は
ウォルトディズニー研究所で考えられた機構とのこと・・・
こちらの映像には、他の機構も紹介されていました。
さらに、この装置の3Dデーターを公開されてるサイトも見つけ
挑戦してみました。
基本的には、上記サイトの3Dデーターを使わせて頂きましたが、
接続部、ギアのサイズ等、少し変更しています。
モーター駆動部や前進させるためのギア部も私のオリジナルです(^^)v
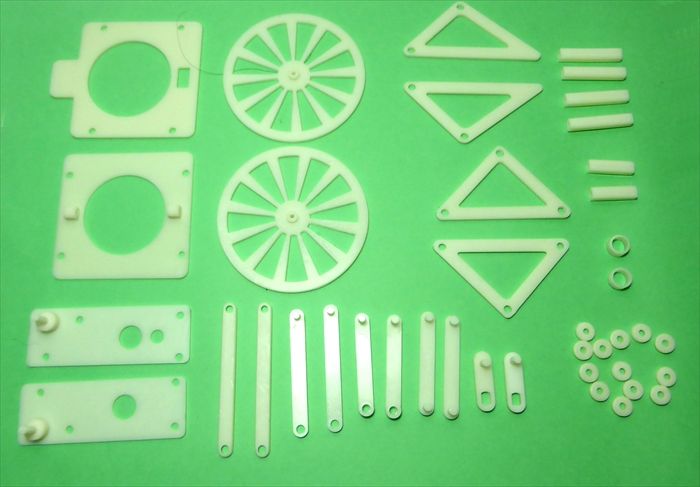
この下の写真3枚が、熱溶解方式の3Dプリンターで印刷したものです。
ギアは参考サイトのデーターのままだと、「あそび」が考慮されておらず、
きつくて回らないので、少しずつ小さくしています。

この枠はハンドル方式で作成したときのものですが、
モーター方式では、モーターを取り付けられるように少し改造しました。

人と人を支える支柱です。
支柱は参考データーより、厚く&太くしています。

まずはこのようはハンドル方式の装置を作成しました。
ハンドルが繋がってるところは、4mmの六角レンチを使用しています。
それ以外はM2、M3のネジを繋ぎに使用しました。

これはモーター方式のものです。

ハンドル方式との違いは、
六角レンチの奥側にギアを1枚追加、
ギアモーターの軸にもギアを接続し、咬み合わせています。
モーターコントローラーも接続し、速度調整が出来るようにしました。


ビデオの最後の前進する装置には、
この3つのギアを追加しました。
黄色ギアは2段にして、上段は半分だけギアを取り付けています。
これで、押したときだけ前進します。
緑ギアは車輪となるところなので、ゴム風船をかぶせて滑り止めとしました。。

上の写真の緑は後輪ですが、前輪も取り付けています。

ギアモーターは金属製のギア比1:298のものを使用しました。
電池は単3型のリチウムイオン電池(14500) 3.7V を使用しています。