Facebookお友達の Lien Tedさんが
今年の4月30日にアップされた作品を拝見してとても感動し
私も3Dプリンターを購入したら是非、真似して作ってみたいと思っていました。
Lien Tedさんの作品はこちらです。
Lien Tedさんも MakerMind.SGさんの作品を参考にされたようです。
脚のところはテオ・ヤンセン機構です。
「ホーリーナンバー」と呼ばれる黄金比を元に、
Fusion360で3Dデーターを作成、
ソフト内のシュミレーションでもうまく動くように出来たので
実際に3Dプリンターで印刷し組み立ててみました。
何度も失敗しながらですが、なんとか完成しました。
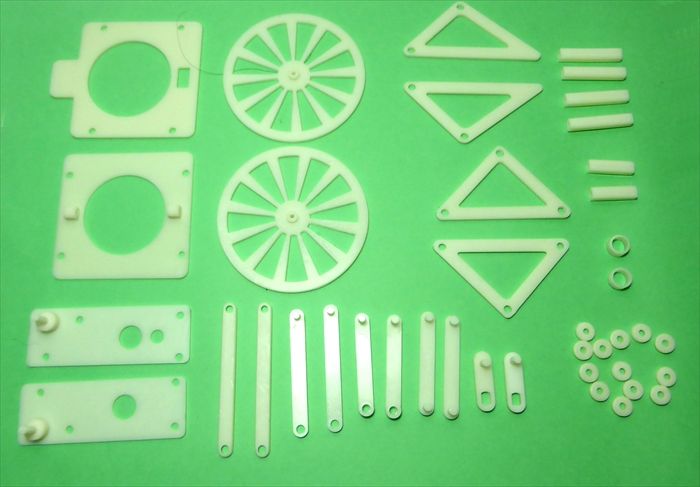
①
こちらが3Dプリンターで印刷したものです。
②
①を1:48のTTモーターに取り付けていきます。

③
脚部のテオ・ヤンセン機構は
「ホーリーナンバー」と呼ばれる比率に従って作成しました。

④
反対側の足は180度ずらして取り付けます。

⑤
馬車の荷台をTTモーターにネジ留めしています。
(TTモーターの黄色プラスチックにネジ用の穴を開けました。)

⑥
⑤と同じサイズで下に車輪のシャフト穴を付けた板を
スペーサー経由で⑤に取り付けます。
さらにφ2mmのシャフトを通し、車輪を取り付けたところです。

⑦
モーター~電池ケース(単3アルカリ3本使用)~スイッチを繋いだら完成です。

MakerMind.SGさん、Lien Tedさんの素晴らしいアイデアに感謝しています。
~~~~~~~~~~~~~~~
私の3Dプリンターは光造形式で「水洗いレジン」を材料としているのですが、
印刷後、曲げると「しなる」ような感じがします。
上の⑦のような姿勢で2日間 置いたままにしていたら
脚の三角のところが曲がってしまいました。
(保管するときは寝かせないといけません)
また落下させたときに割れたところもあり、
やや強度不足のような気もします。
もう少し厚めに印刷するとか、
今後、色々と工夫をしていきたいと思います。
いやはや、驚くばかりです。
返信削除Fusion設計と3D造形、ホントに1カ月前からなの?と疑ってしまうほどの完成度。
やはり、感性が高いので完成度が高い(私としては、ダジャレで勝負しかない)ですね。
一番の驚きは、「ホーリーナンバー」と呼ばれる比率に従って作成しました、という点。
情報収集力、ホンマ、凄い方です。
Hyodoさん
削除嬉しいコメント下さって、ありがとうございます♪
この1か月間はこれしかやっていないので・・・(^^;
Lien Tedさんの作品を見たときは、「テオ・ヤンセン機構」と気づかず、作品を印刷して、それぞれの寸法を割り出していました(笑)
それがある日、なぜか?ふと 「テオ・ヤンセン」を思い出し、ネットで調べて「ホーリーナンバー」と呼ばれる比率に行き当たり
その通りでシュミレーションしてみるとバッチシ!
こういうとき、「やったー!」って感じでめっちゃ嬉しいですよね。
これがあるので、やっぱり工作はやめられません(^^)v
智恵さんから、目が離せなくなりました。Y(^-^)Y.
返信削除ありがとうございます(^^;
削除元の作品は、3Dプリンタではなく、プラスチックの板を加工しているように見えます。
返信削除元の作品はLien Tedさんの作品かしら?
削除Lien TedさんもFusion360のアセンブリで動かす映像も公開されてるので
やはり3Dプリンターで作られたのでしょうね・・・
知らんけど← 関西人がよく口にする文句です(笑)
ホンマやね。よう分からんけど。←今でも、大阪弁が消えない私。~(^0^ )~♪
削除(*'▽'*)♪
削除へええ。動画https://www.geogebra.org/m/tM4yFvDW も観たのですが、彼はこれを自分で見つけたのかなあ。
返信削除これはわかりやすい動画ですね。
削除ご紹介下さって、ありがとうございます♪
chieさん あまり凄すぎてコメントをためらっていました。この動画をみて、以前映画か、テレビで見たことを思い出しました。人の動く速さとそう違わない巨大なリンク機構が風を受けて動いています。この装置を作るのに、上記の各部品寸法(回転軸間距離?)を打ち込むだけですか。部品実体に係わる数値はプログラム化されているのですか。モーターのトルク変化は動物の動きに似ているのだろうか、等々空想の世界にいます。
返信削除渡辺先生、コメント下さってありがとうございます。
削除風を受けて横歩きする巨大なリンク機構、
小さくなって「ミニビースト」という名前で学研の大人の科学から販売されています。
このホーリーナンバーはよく考えられてますね。
3DCADで作るときは、各部品寸法を打ち込むだけと言えば打ち込むだけですが(^^;、
幅や厚みなどを考慮しながら立体を作っていくイメージでしょうか・・・
モーターのトルク変化はよくわからないです。
幅や厚み、アイディアを形にする。ここが難しいところですね。材質による変形も、そして道具を使いこなすことも、全て勉強、研究だと思います。それを続けられるchieさんは素晴らしいです。車輪でないですが、滑らかに動いているように見えます。リンク機構なのに。それでモーターの駆動力の変化などを考えて見たのです。
削除渡辺先生、ありがとうございます。
削除3Dプリンターに関して、全く初心者なので失敗も多々ありますが
それだけにうまくいくと楽しい気分になります。
この楽しさがあるので、益々研究したくもなりますね(^^)
「ホーリーナンバー」の情報ありがとうございました。
返信削除アイスバーをロッドに△部分は板でピン接合は3㎜棒と自転車のムシ(ゴムチューブ)で作りました。
誤差の部分はロッドKが軸に当たるので削り、2軸間の距離は38.79㎜から40mmmに変更して調整。
4本足にして馬ができそうです(チエブシェフリンク機構では成功しました)
パーツの組み立てだけなら工作教室でも使えそうです。
平野様、アイス棒で作成されたのですね。
削除私も3Dプリンターを購入する前、アイス棒で作成しようかと思ったのですが
実際に作るところまで至りませんでした。
チエブシェフリンク機構のことは知りませんでしたが、
ネットで調べると、テオ・ヤンセン機構と同様、歩行に向いているようですね。
機会があれば、お写真やビデオなど見せて頂けると嬉しいです。
テレビ、Yotubeでテオヤンセン馬車やってた時、
返信削除けっこう苦労したって言ってるの聞いてちょっと
安心?しました。智恵さんなんでも簡単に作ってしまう感じに
見えてたので親近感です。
自分もテオヤンセンには一時、ハマりました♪
ほんと、ホーリーナンバーからちょっとはずすと動きが変になりますよね。
一番の自信作?はこちらの
マイコンなど使わずコンパレータIC1つで制御したライントレースロボです。
テオヤンセン、4本足で左右連動で逆位相で動かしていれば常に3点以上接地で安定しますが左右が独立に別々で動くとほぼ2本脚、2点接地に近い状態になることがあると非常に転びやすくてその対策にはとても苦労しました。。。
https://www.youtube.com/watch?v=4BHtP9QZu24&t=11s
動画拝見しました。すごいですね。ビックリの一言です。
削除社内ライントレースロボットコンテストでと書かれてましたが、
そのようなお仕事をされてるのですね?
本当にお詳しいですものね。
私なんて、何の知識もなくお恥ずかしい限り・・・(^^;
何を作るにも、毎回失敗の連続で、それでも最後にうまくいけばいいのですが、
うまくいかず没になることもしばしば・・・
まぁ、無駄な時間じゃなく、いいお勉強が出来たと思うことにしています(笑)
ライントレースロボットコンテスト、
返信削除うちの会社のものづくりクラブみたいなやつでの活動なんです。
仕事でも電子回路制御とかやるんでできますが。。。
独学の智恵さんの方がずっとすごいです♪
実験でされてる考察がまたいいです!
変に知識があったりすると素直にちゃんと事実が
見えてないかもって ハっと させられること
よくあります。
勉強になってます。
ありがとうございます!
仕事を趣味に活かせるなんて最高ですね♪
削除めちゃくちゃ羨ましいです。
私なんて、本当にお恥ずかしい限りです。
また色々と教えて頂けたら嬉しいです(^-^)
近いうちに時計のマーブルマシンに挑戦しようと思っています。
かなり難しそうですが・・・(^^;
4:49・・・ 早起きですねー♪
返信削除マーブルマシン、、、智恵さんもいくつか凝ったやつ見たような。。。