最近、Facebookで台湾のお友達が増え、
工作に関する情報を色々と教えて頂くようになりました。
台湾の方はみなさんとても熱心で、いい刺激を頂いています。
今回作成したジャンピングロボも、台湾のお友達がシェアされていたこちらの動画
を参考に作りましたが、主に次の2点を変更をしています。
・7.4Vのリポバッテリー → 3.7Vのリポバッテリー
・ゴムを使ってモーターを降ろす方式 → ギア方式
参考にさせてもらった作品は、可愛く軽快に飛び跳ねていますが、
このような感じに作るのはなかなか難しく
結局 私はどれくらい高く飛び跳ねるかに挑戦することに!(ほぼあきらめ境地😅)
結局 私はどれくらい高く飛び跳ねるかに挑戦することに!(ほぼあきらめ境地😅)
こちらが私の作ったものです。
<作り方>
①
本体のギアはこのような長さ125mm、歯数83の細長いギアを使いました。
本体のギアはこのような長さ125mm、歯数83の細長いギアを使いました。

このギアを10cmくらいにカットし、両側にアイス棒を貼っています。


上下に板をネジ留め(上は丸棒にしました。)

完成後このようにモーターに付けたギアとかみ合わせることになるので、
幅はこれに合わせて上下の板を取り付けます。

取り付け金具を2枚ネジ留めし、さらに木板をもう1枚取り付けました。
このようにすることで、体の角度を変更できることが出来ます。

この木板に足をボンドで貼っています。
足は18mm×150mmのアイス棒。

上の丸棒の真ん中にもネジを取り付けています。
④
ギアモーターはギア比1:120のものを使用しています。
(1:48はゴムを引っ張る力が弱いですが、小さなジャンプでOKなら大丈夫と思います。)
スイッチを取り付けるための板と、
小さなヒートンを2か所に取り付けました。

⑤
モーター~スイッチ~電池コネクタを接続しています。


⑥
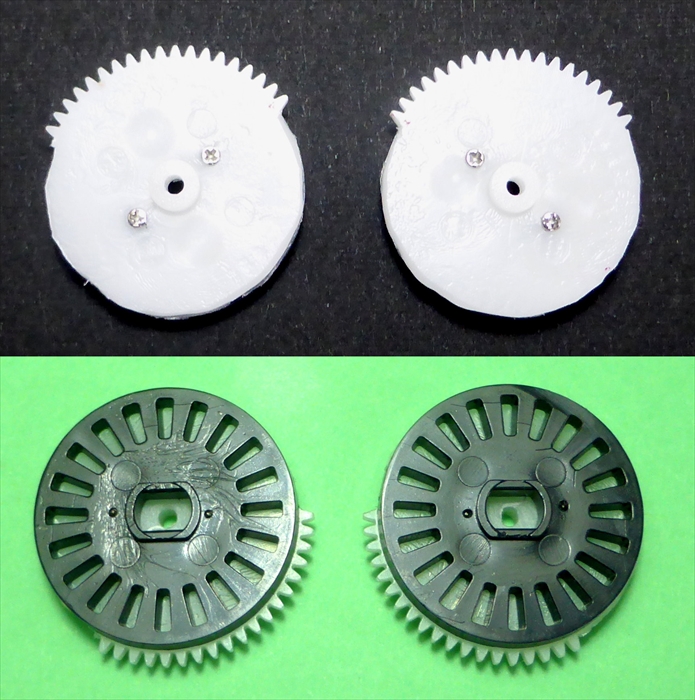
モーターに取り付けるギアです。
白いギアは直径29mm 歯数56のものです。
AliExpressで「562A」で検索すると出てくると思います。
黒いものはTTモーターホィールで、
中心穴がギアモーターの白いシャフトにピッタリはまります。
中心を合わせて2枚をネジ留めし
左右対称になるように、ニッパで歯をカットしました。
ギアモーターに⑥を取り付け
電池側の穴にM3×60mmのネジを差し込んでいます。

⑧
⑥のネジにゴム紐をかけて、③に取り付けます。
普通のゴムでは摩擦抵抗が高く上下しにくいので、ゴム紐を使っています。

丸棒のネジから背中側のヒートンへ 4本、前方のヒートンへ4本のゴムをかけました。
ゴムの本数でジャンプする高さが変わります。

使用したゴムは直径1cmくらいのポリウレタンゴムです。

この状態で動かしてみるとかなり高く飛ぶのですが安定性に欠けるため、
足元にM7のナットを貼っています。

<リポバッテリー使用時の注意事項>
リポパック(リチウムポリマーバッテリー)は、
取扱いを間違えると火災や怪我の危険性がありますので、
取扱には十分な注意が必要です。
こちら ↓ の注意事項をご確認ください。
<後記>
今回一番大変だったのは、着地をしたときにロボが飛び跳ねる対策でした。
足の裏に滑り止めシートを貼ると、
つんのめって、ロボはこけてしまいます。
足を大きくしたり、小さくしたり、平面状にしたり、
テープを貼ったり、スポンジを貼ったりと
思いつくことを手あたり次第やってみましたがダメ・・・
でも参考にさせてもらったロボは全く飛び跳ねることなく
綺麗に着地しています。
この違いは何だろう?と色々と考えてみましたが、
ひょっとすると、跳ね終えて着地をする前に、
ゴムが木に接触して、ギアモーターを降ろし始めてるのかなぁ?と・・・
(間違ってたらすみません。)
ならば!私も小さいギアで!! と思って挑戦してみましたが
ギア同士の咬み合わせがうまくいかず、断念・・・
(数か月放置・・・😅)
2週間前に引っ張り出して、再挑戦!
ギアは結局大きいものでやることとし、
足を逆ハの字型から平行に並べたスキー型に変更。
足を逆ハの字型から平行に並べたスキー型に変更。
さらに足におもりをつけることで、ある程度は安定しました。
もちろん完ぺきではありませんが・・・
おもりは重ければ重いほど安定しますが、飛ぶ高さは落ちてしまいます。
(高さが落ちることでより安定します。)
・ギアの歯数
(高さが落ちることでより安定します。)
・ギアの歯数
・上から前後にかけたゴムの本数
・白いゴム紐の張力
・体の角度
等によっても、飛び方や着地の仕方が変わってきます。
もう少し調整すれば、良くなるかも知れませんが、
今回はこのあたりで断念ということで・・・