以前から作りたいと思っていた磁気浮上装置(Magnetic Levitation)!!
先日ネットサーフィンをしていたところ、このサイトを見つけました。
とても丁寧にかつ詳細に説明して下さっていて、
読んでいると私でも作れそうな気がして挑戦してみることに・・・
読んでいると私でも作れそうな気がして挑戦してみることに・・・
しかし、なかなか思うように進まず、悪戦苦闘しながらようやく完成しました♪
<ホールセンサーについて>
この装置ではホールセンサーで磁石の位置検出を行っています。
ホールセンサーには主に3種類のものがあるようです。
ホールセンサーには主に3種類のものがあるようです。
①ラッチタイプ(磁石の接近をHigh or Lowで検出し、別の極が接近するまで記憶する)
②スイッチタイプ(磁石の接近をHigh or Lowで検出)
今回はアナログタイプのものを使用しています。
しかし、同じアナログタイプでもセンサーの型番やロットによってまでも
出てくる数値や特性はまちまちです。
出てくる数値や特性はまちまちです。
Arduinoのシリアルモニターで見ると、出力される数値を見ることが出来ます。
例えば今回使用した、ホールセンサー「UGN3503」(503 224)は
(電磁石が近くにない状態で)
通常500前後の値、
通常500前後の値、
(センサーの刻印側から)ネオジム磁石のN極を近づけると約320~158、
S極を近づけると約700~883の値となりました。
S極を近づけると約700~883の値となりました。
今回の装置では電磁石の下にホールセンサーをつけるので
電磁石の下がNかSか?によっても出てくる数値は変わってきます。
<この装置の仕組み>
この装置は下図のような仕組みでうまく落ちることなく制御されています。

ホールセンサーから出てくる数値はArduinoのanalogRead(0)で読み取ります。
S極が離れると出てくる数値は小さくなり、近付くと大きくなります。
例えば数値が600以下なら、図の左のように引き寄せ
600以上なら、図の右のように反発させる仕組みです。

S極が離れると出てくる数値は小さくなり、近付くと大きくなります。
例えば数値が600以下なら、図の左のように引き寄せ
600以上なら、図の右のように反発させる仕組みです。
<今回作った装置について>
今回作った装置のホールセンサーは、参考にさせて頂いたサイトで使われている
「UGN3503」を使用しました。
(このホールセンサーが届くまでに手持ちの4種類のホールセンサーで試したところ
「A1324LUA-T」でも浮きましたが、浮かすことが出来る重さは「UGN3503」の半分以下でした。)
「UGN3503」は日本で販売されてるところが見つからず
AliExpressの2店舗で購入しました。
注文してから約2週間後に届いたものは「503 224」と刻印されたものでした。
これで工作を進め、振動対策などを行ってうまく浮くようになりましたが、
その後届いた「503 721」と刻印されたものでは
同じ方法では うまくいきませんでした。
「503 721」の対策は最後の方に書いています。
<作り方>
上でも書いたように
「UGN3503」の「503 224」と刻印されてるものを使用した場合の一例です。
モータードライバーは参考にさせて頂いたサイト(TA7291P)とは 別の
ステッピングモータードライバーL298N miniを使用しました。
TA7291Pでも試したのですが、少し発熱が大きいような気がしました。
L298N miniでは発熱は全くありません。
出力もL298N miniの方が少し大きいように思います。
ただ、L298N miniではTA7291Pのような
電磁石の電源電圧のコントロール(TA7291Pの4pin)は出来ません。
(先日「超音波浮遊マシン」を10個ほど作成し、
そのとき使ったL298N miniが たまたま机の上にあったので、これでやってみました。
何と言っても、L298N miniはめっちゃ安いです(笑))
<配線図>

参考にさせて頂いたサイトに記載されているプログラムも少し変更しました。
<私のプログラム>
こちら
プログラムに記載している
if (x <645 )、else if ( x >=645 && x <845 )の数値は
電磁石の強さ、永久磁石の強さ、ぶら下げる重さによって変更して下さい。
目安は
電磁石とネオジム磁石が強く引き合うときは数値を下げ、
電磁石とネオジム磁石の反応が弱く落ちてしまうときは数値を上げます。
【読み取りの高速化について】
通常のanalogRead(0)の読み取りは1秒間に10000回(分周比128)ですが
もっと速く読み取ることが出来ないか?調べてみると
このようなサイトを見つけました。
分周比16とすることで1秒間の読み取りが約66000回と速くなるようです。
(ATmega328Pの場合)
実際、こうすることで電磁石から聞こえる音が変わりました。
(分周比128のときはジ・ジ・ジというような音、16のときはシャーというような音です)
これも振動防止に少しは寄与しているように思います。
分周比4にしてもいいかも知れません。
~~~~~~~~~~~~~~~~~~
最初は上図のように配線をして、
取りあえずプログラムを書き込んでから、電磁石の極性を調べます。
センサーを貼った方ではわかりにくいので、
センサーを貼っていない方(電磁石の上側)でチェックします。
もし電磁石の上側がS極になっていたらOK、N極なら上図の①と②の接続を変えます。
電磁石を手で持ち、おもりが浮くようにプログラムの数値を少しずつ変更します。
うまく浮くようになると、本体を組み立てますが
そのときに問題となるのが おもりの振動です。
参考にさせて頂いたサイトにも記載されていますが
電磁石を手で持っているときは、おもりは振動せずうまくぶら下がっているのですが、
いざ電磁石を固定すると おもりが振動し
振動は徐々に大きくなり、落下するか上の電磁石に張り付いてしまいます。
手で持ってぶら下げるところまでは割と簡単に出来ますが
振動対策がこの装置の一番厄介なところで、
私はこの振動対策だけで100時間以上かかってしまいました(苦笑)
当初、全ての電源をモバイルバッテリー(5V,1A)1つで作ろうとしていたのですが、
おもりを回転させたときの振動を抑えることは出来ませんでした。
モバイルバッテリーで試すときは、上記プログラムの数値を
if (x <585 )、else if ( x >=585 && x <835 程度に変更してみて下さい。
回転させずに、そーっとぶら下げるだけなら問題なく浮くと思います。)
そこでモバイルバッテリーは諦め、9Vの電源アダプタで作成することにしました。
(全ての電源を9V,1Aの電源アダプター1つで)
それと共にとった対策は
①電磁石とおもりのネオジム磁石を強くし、おもりを重くする
②電磁石がある程度 動くことが出来るようにする
③プログラムで読み取り時間を短縮&電磁石の電流が流れない期間を設ける
等で、ようやく振動がなくなり
安定して浮き続けたときは本当に嬉しかったです。
他にも色々と対策方法はあると思いますので
作成される装置によって工夫してみて下さい。
~~~~~~~~~~~~~~~~~~
①
電磁石はM6×35mmの鍋小ねじにφ0.4mmのUEWを1300回巻きにしました。
上下の薄緑色の円形のものは厚紙です。
ナットは少し緩めに留めて穴を作りました。
(ネオジム磁石が電磁石とくっついたとき、ホールセンサーが挟まれて壊れやすいので
ホールセンサーの避難場所のためです。)

②
フィルムケースの底に6mm程度の穴を開け、ホールセンサーを入れています。

③
土台は木で作成し、上部の中心にM4×10mmの鍋小ねじをネジ留めしています。

④
フィルムケースに電磁石を入れて、
(フィルムケースは長すぎるので上部5mmほどカットしています。)
ネジの頭に12mm×3mmのネオジム磁石を貼り付け(S極が上 N極が下です。)
土台の鍋小ねじに貼り付けたところです。
このようにすることで、電磁石がある程度自由に動くことが出来て
振動を抑えることが出来ました。

⑤
ただこのままでは落ちやすいので、針金を上の木材に通して ゆるめに留めています。

後ろ側です。

⑥
電源部です。
左の黒いコネクタに9V1Aの電源アダプタを差し込みます。
真ん中がArduino Nano 互換機(Atmega328)
右がステッピングモータードライバーL298N miniです。


ぶら下げるものは4種類のものを準備しました。
・ボルト人形 ・男の子 ・ランタン ・地球儀
地球儀以外の3種類は77~79gで、地球儀は316gです。
(磁石も含めた総重量です。)
<ボルト人形>




男の子は手にファンの風を当てて回転するようにしています。
ファンはDCファン(25mm角、定格5V)です。
電源を1つにまとめたいので、9V→5VのDC-DCコンバーターを取り付けました。
(下の写真左上のコネクタの付いた基盤)
(組み立て後に「三端子レギュレーター」を使えばよかったかな?と気づきました。)
Arduino、モータードライバーは9V、ホールセンサーはArduinoの5V
DCファンはDC-DCコンバーターからの5Vを給電します。

当初、発振回路で回転させようとしたのですが、
電源を別にしないと不安定だったので断念しました。
ホールセンサーをもう一つ使って回転させる方法もありますね・・・

風船の上の方には穴を開けたペットボトルの蓋をかぶせて
蓋の周囲にも紙を貼っています。

乾燥させて1日後、風船を破裂させて取り外します。
ペットボトルの蓋は外しにくいですが、針で少しずつ隙間を拡げて外します。

取り外した蓋にイルミネーションLED3個を並列接続にしました。
電池はコイン電池を使いたいところですが、
イルミネーションLEDを並列にしたとき、
コイン電池からとれる電流容量が少なく青色が光りにくいので
リチウムイオン電池(16340)を使っています。

磁石はφ20mm×10mm、φ15mm×5mm、φ12mm×3mmの3段重ね、
中にはM10用のナットにφ12mm×3mmを付けたものを入れます。
(S極が上 N極が下です。)

ランタンに入れて、磁石同士をくっつけます。

ランタンンの口にLED付きのペットボトルの蓋を差し込み、
LEDを位置を整えます。


重さは77gです。

当初、相互誘導方式で電池なしで光らせようとしたのですが、
電源を別にしないと不安定になること、
相互誘導の1次回路の電源を5Vにすると、トランジスタの発熱が大きいこと
(トランジスタ2SC2120は勿論のこと、TIP41C、TIP35Cでも熱くなります。
ヒートシンクを付けるとなんとかいけそうな感じではありますが・・・)
だからと言って1次回路の電源を1.5~3Vにすると、光り方が悪くなる
等の理由で、今回は電池で光らせることにしました。
いつか、磁界共鳴方式で光らせてみたいです。


ビタミンの入っていたケースに入れました。
底には6mm程度の穴を開け、ホールセンサーを入れて、
スポンジシートを貼りました。


<「UGN3503」の「503 721」と刻印されてるホールセンサーの場合>
上の方でも書きましたが、同じ「UGN3503」でも
「503 224」と「503 721」では反応が異なっていました。
(224、721以外にもあるようですが、手元になく試していません。)
Arduinoのシリアルモニターでホールセンサーから出力される数値を見ると
プログラムの if ( x <645 )をif ( x <790 )にすると、
取りあえず浮きますが、かなりパワーが弱くそれほど重いものは浮きません。
そこで、NとSを全て入れ替え、プログラムの数字も変更してみました。
・ぶらさげる磁石のN極,S極を反対にする
・電磁石は最初のチェックで上がN極になるようにする。
・プログラムは if ( x <174 )くらいの数値にする。

これで取りあえず77gのものを振動することなく浮かすことが出来ましたが、
「503 224」に比べるとやや不安定な気がします。
もう少し対策を考えた方がいいかも知れません。
~~~~~~~~~~~~~~~~~~
今回は長文となり申し訳ありません。
わかりにくい点も多々あると思いますが、
最後までお読み下さって、本当にありがとうございました。
(このホールセンサーが届くまでに手持ちの4種類のホールセンサーで試したところ
「A1324LUA-T」でも浮きましたが、浮かすことが出来る重さは「UGN3503」の半分以下でした。)
「UGN3503」は日本で販売されてるところが見つからず
AliExpressの2店舗で購入しました。
注文してから約2週間後に届いたものは「503 224」と刻印されたものでした。
これで工作を進め、振動対策などを行ってうまく浮くようになりましたが、
その後届いた「503 721」と刻印されたものでは
同じ方法では うまくいきませんでした。
「503 721」の対策は最後の方に書いています。
<作り方>
上でも書いたように
「UGN3503」の「503 224」と刻印されてるものを使用した場合の一例です。
モータードライバーは参考にさせて頂いたサイト(TA7291P)とは 別の
ステッピングモータードライバーL298N miniを使用しました。
TA7291Pでも試したのですが、少し発熱が大きいような気がしました。
L298N miniでは発熱は全くありません。
出力もL298N miniの方が少し大きいように思います。
ただ、L298N miniではTA7291Pのような
電磁石の電源電圧のコントロール(TA7291Pの4pin)は出来ません。
(先日「超音波浮遊マシン」を10個ほど作成し、
そのとき使ったL298N miniが たまたま机の上にあったので、これでやってみました。
何と言っても、L298N miniはめっちゃ安いです(笑))
<配線図>
参考にさせて頂いたサイトに記載されているプログラムも少し変更しました。
こちら
プログラムに記載している
if (x <645 )、else if ( x >=645 && x <845 )の数値は
電磁石の強さ、永久磁石の強さ、ぶら下げる重さによって変更して下さい。
目安は
電磁石とネオジム磁石が強く引き合うときは数値を下げ、
電磁石とネオジム磁石の反応が弱く落ちてしまうときは数値を上げます。
【読み取りの高速化について】
通常のanalogRead(0)の読み取りは1秒間に10000回(分周比128)ですが
もっと速く読み取ることが出来ないか?調べてみると
このようなサイトを見つけました。
分周比16とすることで1秒間の読み取りが約66000回と速くなるようです。
(ATmega328Pの場合)
実際、こうすることで電磁石から聞こえる音が変わりました。
(分周比128のときはジ・ジ・ジというような音、16のときはシャーというような音です)
これも振動防止に少しは寄与しているように思います。
分周比4にしてもいいかも知れません。
~~~~~~~~~~~~~~~~~~
最初は上図のように配線をして、
取りあえずプログラムを書き込んでから、電磁石の極性を調べます。
センサーを貼った方ではわかりにくいので、
センサーを貼っていない方(電磁石の上側)でチェックします。
もし電磁石の上側がS極になっていたらOK、N極なら上図の①と②の接続を変えます。
電磁石を手で持ち、おもりが浮くようにプログラムの数値を少しずつ変更します。
うまく浮くようになると、本体を組み立てますが
そのときに問題となるのが おもりの振動です。
参考にさせて頂いたサイトにも記載されていますが
電磁石を手で持っているときは、おもりは振動せずうまくぶら下がっているのですが、
いざ電磁石を固定すると おもりが振動し
振動は徐々に大きくなり、落下するか上の電磁石に張り付いてしまいます。
手で持ってぶら下げるところまでは割と簡単に出来ますが
振動対策がこの装置の一番厄介なところで、
私はこの振動対策だけで100時間以上かかってしまいました(苦笑)
当初、全ての電源をモバイルバッテリー(5V,1A)1つで作ろうとしていたのですが、
おもりを回転させたときの振動を抑えることは出来ませんでした。
モバイルバッテリーで試すときは、上記プログラムの数値を
if (x <585 )、else if ( x >=585 && x <835 程度に変更してみて下さい。
回転させずに、そーっとぶら下げるだけなら問題なく浮くと思います。)
そこでモバイルバッテリーは諦め、9Vの電源アダプタで作成することにしました。
(全ての電源を9V,1Aの電源アダプター1つで)
それと共にとった対策は
①電磁石とおもりのネオジム磁石を強くし、おもりを重くする
②電磁石がある程度 動くことが出来るようにする
③プログラムで読み取り時間を短縮&電磁石の電流が流れない期間を設ける
等で、ようやく振動がなくなり
安定して浮き続けたときは本当に嬉しかったです。
他にも色々と対策方法はあると思いますので
作成される装置によって工夫してみて下さい。
~~~~~~~~~~~~~~~~~~
①
電磁石はM6×35mmの鍋小ねじにφ0.4mmのUEWを1300回巻きにしました。
上下の薄緑色の円形のものは厚紙です。
ナットは少し緩めに留めて穴を作りました。
(ネオジム磁石が電磁石とくっついたとき、ホールセンサーが挟まれて壊れやすいので
ホールセンサーの避難場所のためです。)

②
フィルムケースの底に6mm程度の穴を開け、ホールセンサーを入れています。

③
土台は木で作成し、上部の中心にM4×10mmの鍋小ねじをネジ留めしています。

④
フィルムケースに電磁石を入れて、
(フィルムケースは長すぎるので上部5mmほどカットしています。)
ネジの頭に12mm×3mmのネオジム磁石を貼り付け(S極が上 N極が下です。)
土台の鍋小ねじに貼り付けたところです。
このようにすることで、電磁石がある程度自由に動くことが出来て
振動を抑えることが出来ました。

⑤
ただこのままでは落ちやすいので、針金を上の木材に通して ゆるめに留めています。

後ろ側です。

⑥
電源部です。
左の黒いコネクタに9V1Aの電源アダプタを差し込みます。
真ん中がArduino Nano 互換機(Atmega328)
右がステッピングモータードライバーL298N miniです。

改めて回路図も記載します。
~~~~~~~~~~~~~~~~~~
・ボルト人形 ・男の子 ・ランタン ・地球儀
地球儀以外の3種類は77~79gで、地球儀は316gです。
(磁石も含めた総重量です。)
<ボルト人形>

目から上が磁石です。
φ20mm×10mm、φ15mm×5mm、φ12mm×3mmの磁石を3段重ねにしています。
(S極が上 N極が下です。)
磁石はφ20mm×10mm 1個で浮くのですが
電磁石の鉄心との反応が強いので
このように3段重ねにしてみました。
実際に作られる方は、磁石も色々と変えて試してみて下さい。
体や手足はボルト、ナット、小ねじ、傘釘等を
"板金用ハンダ"でハンダ付けしています。
(通常のハンダでは鉄同士はつきません。)
体重77gです。

<男の子>

ボルト人形と同様に板金用ハンダで胴体にM3鍋小ねじをハンダ付けし
木製の手足を取り付けました。
顔は透明カプセルを着色、目に青色LEDを埋め込み、
コイン型電池(CR2032)で光らせます。
電池はカプセルの中に入れています。
頭に取り付けた磁石は
φ20mm×10mm、φ15mm×5mm、φ12mm×3mmを3段重ねにしています。
(S極が上 N極が下です。)
体重79gです。

ファンはDCファン(25mm角、定格5V)です。
電源を1つにまとめたいので、9V→5VのDC-DCコンバーターを取り付けました。
(下の写真左上のコネクタの付いた基盤)
(組み立て後に「三端子レギュレーター」を使えばよかったかな?と気づきました。)
Arduino、モータードライバーは9V、ホールセンサーはArduinoの5V
DCファンはDC-DCコンバーターからの5Vを給電します。

当初、発振回路で回転させようとしたのですが、
電源を別にしないと不安定だったので断念しました。
ホールセンサーをもう一つ使って回転させる方法もありますね・・・
<ランタン>
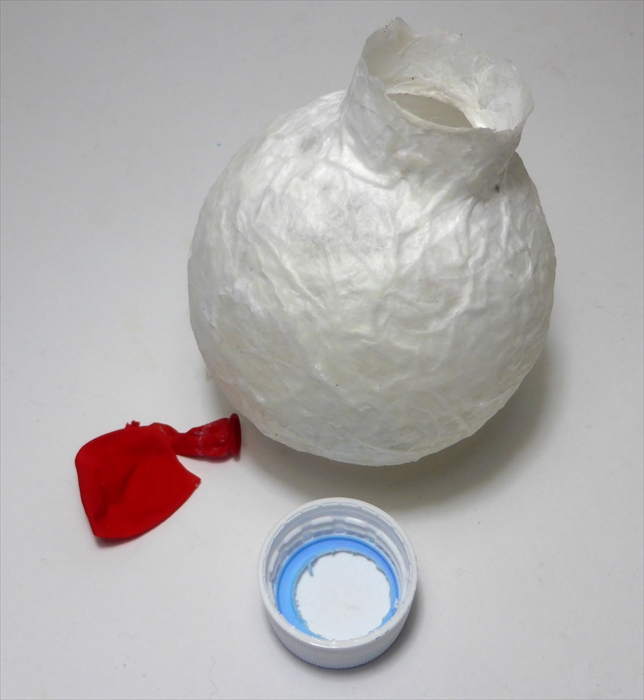
水風船を膨らませて、その全面にダイソーの「flower paper」の白色を貼ります。
貼るときは木工用ボンドを水で溶きサラサラの状態にしたものを付けながら
貼っていきます。約5枚分の紙を貼り付けました。

風船の上の方には穴を開けたペットボトルの蓋をかぶせて
蓋の周囲にも紙を貼っています。

乾燥させて1日後、風船を破裂させて取り外します。
ペットボトルの蓋は外しにくいですが、針で少しずつ隙間を拡げて外します。
取り外した蓋にイルミネーションLED3個を並列接続にしました。
電池はコイン電池を使いたいところですが、
イルミネーションLEDを並列にしたとき、
コイン電池からとれる電流容量が少なく青色が光りにくいので
リチウムイオン電池(16340)を使っています。

磁石はφ20mm×10mm、φ15mm×5mm、φ12mm×3mmの3段重ね、
中にはM10用のナットにφ12mm×3mmを付けたものを入れます。
(S極が上 N極が下です。)

ランタンに入れて、磁石同士をくっつけます。

ランタンンの口にLED付きのペットボトルの蓋を差し込み、
LEDを位置を整えます。

電池を縦に挿入し落ちないようにクリアファイルで蓋をしてネジ留め、
スイッチも取り付けました。

重さは77gです。

電源を別にしないと不安定になること、
相互誘導の1次回路の電源を5Vにすると、トランジスタの発熱が大きいこと
(トランジスタ2SC2120は勿論のこと、TIP41C、TIP35Cでも熱くなります。
ヒートシンクを付けるとなんとかいけそうな感じではありますが・・・)
だからと言って1次回路の電源を1.5~3Vにすると、光り方が悪くなる
等の理由で、今回は電池で光らせることにしました。
いつか、磁界共鳴方式で光らせてみたいです。
<地球儀>
地球儀は316gと他の3種類の77~79gに比べ4倍の重さがあるため、
電磁石とネオジム磁石は強力にしました。

電磁石はM12×55mmの六角ボルトにφ0.55のUEWを1300回巻きにしています。

底には6mm程度の穴を開け、ホールセンサーを入れて、
スポンジシートを貼りました。

ネオジム磁石はφ25mm×10mmを2個重ねたもの
地球儀の内側にφ20mm×3mmの磁石を入れて、これとくっつけています。

プログラムは if ( x <645 )を if ( x <793 )としています。
(else if ( x >=645 && x <845 )は削除)
~~~~~~~~~~~~~~~~~~
上の方でも書きましたが、同じ「UGN3503」でも
「503 224」と「503 721」では反応が異なっていました。
(224、721以外にもあるようですが、手元になく試していません。)
Arduinoのシリアルモニターでホールセンサーから出力される数値を見ると
(電磁石が近くにない状態で)
通常510前後の値(224よりやや高め)
ネオジム磁石のN極を近づけると約220~159(224より低め)
S極を近づけると約830~883(224よりかなり高め)の値となりました。
上で紹介した「503 224」と同じように作ってS極を近づけると約830~883(224よりかなり高め)の値となりました。
プログラムの if ( x <645 )をif ( x <790 )にすると、
取りあえず浮きますが、かなりパワーが弱くそれほど重いものは浮きません。
そこで、NとSを全て入れ替え、プログラムの数字も変更してみました。
・ぶらさげる磁石のN極,S極を反対にする
・電磁石は最初のチェックで上がN極になるようにする。
・プログラムは if ( x <174 )くらいの数値にする。
これで取りあえず77gのものを振動することなく浮かすことが出来ましたが、
「503 224」に比べるとやや不安定な気がします。
もう少し対策を考えた方がいいかも知れません。
~~~~~~~~~~~~~~~~~~
今回は長文となり申し訳ありません。
わかりにくい点も多々あると思いますが、
最後までお読み下さって、本当にありがとうございました。
ciheさん 月並みな言葉ですみませんがまたまた凄いですね。Hall素子について詳しい説明、データシートのことなども紹介されてとても有難いです。コンピューターについても駆使できるということがよくわかります。吊り下げられるものが手を離して以降振動する件で「物を掴もうとするがその場所よりも伸べたり、引いた手の位置のずれが次第に大きくなりついには転んでしまう病気の人がいた」という話を思い出しました。まるで発振現象みたいです。③の方法など、検出値を微分した値も考慮した微分制御的効果みたいです。本当にワクワクしながら読ませていただきました。有難うございます。
返信削除渡辺先生、嬉しいコメントを下さってありがとうございます♪
削除物理現象は色んな事象の組み合わせだということがよくわかる実験でした。
でも同じような病気の方がおられるとはビックリですね。この方は完治されたのかしら・・・?
実験装置を改良するのは、何度でも作り変えたりプログラムを書き換えたり出来ますが
人の治療の場合はそのようなわけにはいかないから、お医者さんは大変でしょうね。
物理も医療も先人の方々の研究のおかげで今があると思うと本当にありがたいです。
振れ幅が大きくなる病気のこと、ネットで調べましたが 見当たりませんでした。済みません。パーキンソン病の方で、歩くとき加速が止まらない(前傾が大きくなる)という症状はあるようです。振幅が大きくなるわけではありませんね。間違いでした。
返信削除コンピューターの入出力はA-D変換、D-A変換端子もあるのですか。私の場合は専用IC
を購入して自作でした。それも、8bitどまりです。
東芝トランジスタ工場では電気炉の修理を担当していましたが、そのときの温度制御はニクロム線式の場合ON,OFF制御とスライダックの出力電圧を変える(多分比例制御)方式でした。そのうちPID制御のものも入りましたが、理解できませんでした。
chieさんの作品では使われるキャラクターが可愛くて面白く楽しいです。センスの良さ、お人柄でしょうか。
一つの問題解決に100時間、根性の方でもありますね。
病気の方、パーキンソン病だったのですね。
削除マイコンの入力はDCのみなので、電源アダプタ(今回は9V)で入力しました。DC→DC基盤は結構持ってますが、DC→ACとなるものは持っていないです(^^;
PID制御に関しては私もさっぱりわからないです。
そうなんです!根性だけは自信があります。
取りあえず100時間少々でうまくいきましたが、うまくいってなかったらまだまだずっとやってると思います。(笑)
やはり、根性の方でしたか。頼もしいです。例のスイッチの件今日中にアップロードします。三沢航空科学館では何とか、三路スイッチ、四路スイッチまで進んでもらいました。
削除これから、ケーズデンキに滅茶苦茶古いFAX2台のリサイクル処分をお願いに行ってきます。
お風邪など召しませんように。
スイッチ、楽しみにしています。
削除私の方は今から加古川のファラデーラボです。今日は気象がテーマです。
渡辺先生もお風邪など引かれませんように・・・
一昨年,Arduinoで「空中浮遊」をやってみたのですが,秋月のホールセンサだとピンポン玉くらいの軽いものしか浮かせることができませんでした。
返信削除智恵さんのこの記事に刺激され,UGN3503を入手して作り直しました↓
http://physics.cocolog-nifty.com/weblog/2021/04/post-52738b.html
UGN3503は「503 341」と刻印されたものですが,とりあえず70gくらいの質量のものは浮かせることができるようです。
「analogReadの高速化」というテクニックは知らなかったので勉強になりました。ありがとうございました。
村田先生
削除磁気浮上装置を試して下さって、ご報告まで下さって嬉しいです。
地球儀、綺麗に浮いてますね~(^-^)/
私もblogに書いてるように、Instructablesに掲載の作品を参考にさせて頂きながら作成しましたが、
うまく浮いたときの感動は何とも言えないものがありますよね。
「503 224」はAliExpressの色んなお店に問い合わせたのですが、
今のところ販売されてるお店は見つかりませんでした。
問い合わせする中で、とあるお店の方が「AN-503」が純正品で性能も良いとおっしゃったので購入してみましたが、
「503 224」の方が断然良かったです(^^;
智恵さんはArduino使ってたよな・・・PID制御でなんかやってたかなって
返信削除検索してもPIDは引っ掛からなかったですが
磁石浮遊、PID制御は使ってないですか?
磁石浮遊、、、割とこれもPID制御の学習題材でよく見かけた気がしますが...
というのは、、、智恵さん、倒立振子やってたりしないかなと思って探したのが先でして。
やってないようならぜひやってみませんか。。。ってお誘いです。
智恵さん、制御ごとも好きそうだし。あれも奥が深いです面白いです。
自分は、昔はとてもお金も時間も掛かってた倒立振子が今はマイコン、、
特にM5シリーズなんか使うとはるかに身近な工作になったので。
自分はここ最近では一番力の入ってる?工作のひとつです。
Arduino・・・確かにやってるのですが、
削除それほど詳しくもなく、たまに使用する程度です(^^;
以前、MPU-6050のジャイロセンサーを使って倒立振子を作ってみたい!
と思ったこともあったのですが、
結局、いまだに挑戦すらしていません(-"-;
shinichi さんのM5stickくんを始めて見たときは
「すご~い!」って本当に感動でした。
私でも作れるものでしょうか?
準備するものは
M5StickC、モータードライバー、ギアモーターなどでしょうか?
準備する材料からして、よくわからず(^^;
最初からお手数をおかけして申し訳ないのですが、
教えて頂けたら嬉しいです。宜しくお願いします。
そうですか、じゃ、ぜひやってみましょ!!!
削除智恵さんはセンスいいからきっとすぐです。
ぼくが最初にお勧めしてるのは簡単構成の
M5stickC Plus と 連続回転サーボFS90R2個で作るやつです。
モータドライバは不要です。
ぼくはM5stickCよく使うので
アリエクスプレスでいくつかまとめ買いとかしてます。
連続回転サーボは
一般的なマイクロサーボSG90HVが安くて低消費電力で高精度なのですが
デジタルで応答が遅く扱いが難しいです。
FS90Rは旧式のアナログで消費電力若干多いですが
応答速く扱いやすいのでお勧めです。
ここ最近ではマルツが480円くらいで安いかな。
組立て~立たせ方までの流れはこんなに簡単です、
https://n-shinichi.hatenablog.com/entry/2022/06/01/003435?_ga=2.178978017.47371328.1658156051-124876159.1618931563
そのプログラム、スケッチ・・・はブログに載せてます。
智恵さんは3Dプリンタお持ちだし、お世話になってるから
そのM5stickケースのSTLデータ、メールとかで送ります。
色々と教えて下さって、ありがとうございます♪
削除M5stickC PlusとFS90R2個を購入してみます。
モータードライバーは要らないのですね。
Amazonでタイヤとセットになったものを見つけたのですが、これどう思われますか?
https://www.amazon.co.jp/Feetech-FS90R-%E3%83%9E%E3%82%A4%E3%82%AF%E3%83%AD%E3%82%B5%E3%83%BC%E3%83%9C-360%E5%BA%A6%E9%80%A3%E7%B6%9A%E5%9B%9E%E8%BB%A2%E3%82%B5%E3%83%BC%E3%83%9C-900us-2100us/dp/B077JFCPCX/ref=sr_1_5?__mk_ja_JP=%E3%82%AB%E3%82%BF%E3%82%AB%E3%83%8A&crid=3T5Q1EQYT1GM9&keywords=FS90R&qid=1659174898&sprefix=fs90r%2Caps%2C491&sr=8-5
プログラム、スケッチはここに書かれてるものでしょうか?
https://n-shinichi.hatenablog.com/entry/2022/06/02/005105
M5stickケースのSTLデータ、頂いてもいいのでしょうか?
助かります。ありがとうございますヽ(^-^)/
なんだかお願いと質問ばかりで申し訳ありませんが、宜しくお願いします。
お願い・・・ そんなんお安い御用です♪
返信削除Amazon,タイヤ付きFS90R,そんなのよく見つけましたね!
知りませんでした。 約1800円・・・が微妙なくらいでしょうか。
何も悪くないです。
その大径タイヤをバラで買うと2個で1000円くらいするので
そのセットでいくなら安いですね。
でもってタイヤはそのサイズだとかなり制御が楽になります。
こちらご覧になったでしょうか
タイヤサイズ掛けたら応答性、機動性が格段に上がります。制御が楽になります・・・
https://n-shinichi.hatenablog.com/entry/2021/09/06/005035?_ga=2.20060285.47371328.1658156051-124876159.1618931563
ただ・・・智恵さんには
ちょいと難しい小径タイヤでも十分行けるかとも思いまして・・・
ちょいとお安く始められるので。タイヤの分。。。^^;
タイヤ・・・で忘れてました、小径の方、サーボについてくる円形サーボホーン
外径約24㎜にちょびっと伸ばして内径22程度のOリングをつけるといい感じになります。
Oリングとかは智恵さんいろいろ持ってそうな。。。
大きなタイヤからっての全然問題ないですよ。
スケッチはそれが制御部のベースです。データはまた送りますね。
返信削除chieさん
返信削除「磁気浮上装置」試作結果を楽しく拝見させて頂いています。
大変、参考になります。
さて、私も研究中なのですが「ホールセンサー」について気になっています。
「UGN3503」224(ロットNoでしょうか?)を用いると、永久磁石を安定に浮上可能で重たい重量を浮上させることができたということですが、224と721の違いは仕様書には記載されていないようです。
また。「AH3503」という品名のものも存在するようです。
詳細は不明ですが、仮にロットNoの違いにより感度が異なるとすれば、
Allegroの仕様書を見ると、感度は 0.75(min)-1.30(typ)-1.75(max) (mV/G)
と記載されています。感度が低い方が良いのか高い方が良いのか?不明ですが、chieさんのご見解はありますか?
あと重要なところは、codeでの閾値の設定ですね?
もしご意見がありましたらお聞きしたいです。
neo
neoさん、見て下さってありがとうございます♪
削除ホールセンサーの件、私もかなり忘れてしまっていて申し訳ないですが、
「UGN3503」224だけは他のロット番号と大きく異なっていたように思いました。ロット番号7〇〇、9〇〇など色々と試しましたが・・・
「AH3503」というのも「UGN3503」と同じものかな?と思っています。
私はAliExpressで購入することが多いですが、
「AH3503」「UGN3503」どちらを注文しても同じものが届いた記憶があります。
感度の件はよくわからず、申し訳ありません。
chieさん
削除私は手持ちの「AH3503」を使用していますが、現状重いおもりは浮上させることができず、せいぜいピンポン玉くらいです(笑)
電磁石をON/OFFさせる閾値をCODEで変化させた場合のArduino出力D10,D11のパルス幅に関して、周期が一定ではない不定期でON/OFFするため、オシロで観測時にストレージモードにしないとデューティの%が特定できません。周期を一定にしてデューティだけを変化させる回路に変更すれば評価しやすいかもしれません。
今後何か月かかるか?分かりませんがこの研究は継続していこうと思います。
技術的な見解がまとまりましたら、chieさん及び本サイトをご覧になっている皆さまに公開したいのですが、技術資料を添付する方法としてはホームページを立ち上げてリンクを貼れば良いのでしょうか?
他の手段もありますか?
neo
neoさん、「AH3503」を使われてるのですね。
削除「UGN3503」224は1つだけで良ければ、お送り出来ます。
もし良ければ、blog@eneene.com にメールをお願いします。
研究成果のご報告に関して、リンクを貼って頂けるとのこと
ありがとうございます。
とても嬉しく思いますが、私の方はいい加減な実験なので、あまりお気を遣わないで下さいね。
chieさん
削除「UGN3503」は現在アマゾンで買えますので先日発注しました。
どんなロットが来るか?不明ですが・・・
有難うございます。大丈夫です。
同一のホールセンサーで感度を上げると改善されるのか?
バンド幅BW(感度)が関係するのか?
海外のサイトを見ても詳細は公開されていないようです。
また、Arduinoのアナログ入力のADコンバータに関してですが、
ホールセンサー出力のアナログ電圧を仮に0~5000mVとした場合、
1023等分しているので5000/1023=約5mVとなります。
制御が数mVのところでされているならば5mV/1等分はちょっと雑?なのかもしれませんし・・・
謎だらけで楽しいです。
neo
neoさん、そうなんですね。
削除でももし必要になったときは仰って下さいね。
これから色々と解明されることを楽しみにしています。
chieさん
削除「AH3503」「UGN3503」はアンプがICに内蔵されていて感度に関するロットのバラツキが制御に関係していました。結論から申し上げますと感度が低いロットの製品だと制御可能で、高すぎる製品はNGです。
重たいペイロードを浮遊させる場合、必然的に磁束密度が高い大きな永久磁石(φ25X10mmとか)にしますが例えばB=100(mT)程度でホールICが磁気的飽和してしまって制御不能となります。
対策案としてはアンプが内蔵されていないホール素子(GaAs、HG-166A、旭化成の製品)出力を適度に増幅させた磁気センサーを用いれば例えばB=300(mT)以上の強い磁界中でも磁気的飽和を起こさずに制御可能となりました。
技術資料のブログを一般公開しましたので閲覧下さい。
(現在、Bingの検索エンジンでは閲覧できました)
neo
https://permanentmag123.blogspot.com/
neoさん、ご報告下さってありがとうございます。
削除「AH3503」「UGN3503」はそういうことなのですね。
教えて下さって、ありがとうございます。
GaAs、HG-166Aは秋月電子でも購入出来そうですね。
私も一度挑戦してみたいと思います。
neoさんの資料や動画も拝見しました。
安定して浮いてますね~(^-^)