鉄の壁をのぼる「Climbing robot」を作ってみました。
両側の車輪にネオジム磁石を4個ずつ取り付けて、鉄の壁に貼り付く仕組みです。
両側の車輪にネオジム磁石を4個ずつ取り付けて、鉄の壁に貼り付く仕組みです。

Youtubeの「How to make a wheg climbing robot at home」
(Brainergiserさんの作品)を参考にしています。
Brainergiserさんの作品との違いは
車輪の素材&磁石、尻尾に磁石をつけたところ、目を付けたところ等です。
①
車輪は12mmの角材で作りました。

②
車輪に付ける磁石は、ダイソーの13mmφのネオジム磁石を
クリアファイルに入れ、テープで留めています。

③
ttギアモーターの軸の形状に合うように穴をあけて、

④
③を①の中心にネジ留めしています。

⑤
ttギアモーターの上下に薄い板を取り付けました。

⑥
下側に6mm×3mmのリング磁石3個をアルミ針金に通して
取り付けたのですが、
取り付けたのですが、

いざ動かしてみると、安定性が悪かったので
12mm×3mm(穴4mm)のリング磁石3個を、
アルミパイプ+木材でしっかり固定しました。

⑦
目はダイソーのループエンド(手芸品)に青色LEDを入れています。
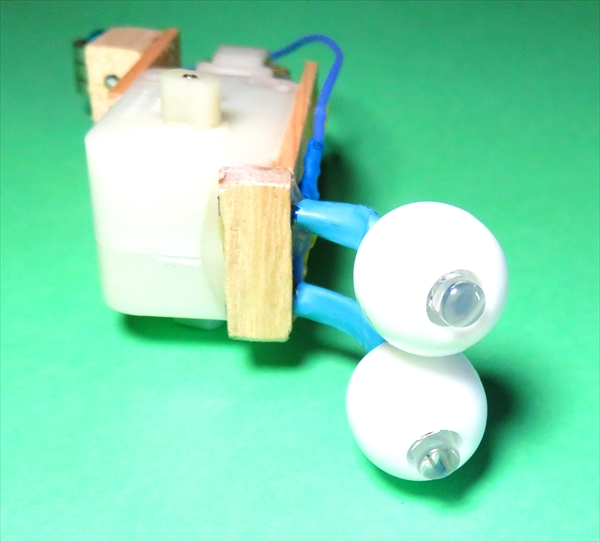
⑧
目には100Ωの抵抗を入れ、
電源は250mAhのリポパックで配線しました。
リポパック(リチウムポリマーバッテリー)は、
取扱いを間違えると火災や怪我の危険性がありますので、
取扱には十分な注意が必要です。
もしこれを見て、作って下さる方は こちら ↓ の注意事項をご確認ください。

⑧に④を取り付けたら完成です。

ギア比の違うttモーターを使って2体作ってみました。
左は1:120、右は恐らく1:400くらいありそうな感じです。
左の方がかなり速く走ります。
右はトルクが大きいので、安定した動きです。

このオリに入れておくと、勝手に歩き回ってくれます。
実は、このロボは なかなか真っ直ぐに歩行してくれず、
苦肉の策として、このオリを作りました。
実は、このロボは なかなか真っ直ぐに歩行してくれず、
苦肉の策として、このオリを作りました。

ロボは左と右で、尻尾の長さ&角度を変えました。(赤丸部分)
左のロボの尻尾がもう少し長いと、オリの左上の角を曲がるときに時々 落下します。
右のロボの尻尾がもう少し短いと、オリの右上の角を曲がるときに時々 落下します。
(5回に1回くらい)

尻尾の長さ&角度で落下防止になるとわかったときは
嬉しかったです♪ 今回の一番の工夫点 (笑)
理由はよくわからないですが、
トルクの大きさ、磁石を引き離すタイミングや
重力バランスなど関係しているかも知れません。
実は目はつけない方が、落下しにくいのですが、
出来れば付けたかったので・・・(^^;
速く歩くタイプ、遅く歩くタイプともにビデオに撮ってみました。
Chieさんこんばんは
返信削除また面白いものを作りましたね、生きているような動きで見ていて楽しいです。
足首が関節のように曲がるのが工夫されているポイントのようで、これなら磁石で保持している回転角度が大きくとれ安定して上りますね、目玉が光るのも可愛いです、上手く出来ていて素晴らしいですね。
啄童さん
削除いつも見て下さってありがとうございます。
細かい動き等、気になり 手直しだらけですが、手をかけた分ペットのように可愛く思える存在になりました(^^;
足首の関節にクリアファイルを使ったのは、参考にさせてもらったBrainergiserさんのアイデアですが、
ホントよく考えられてますね。もう少し硬い素材でもやってみましたが、曲がり切れませんでした。
目はどうしても付けたくって、でも付けると落下しやすくって・・・
一番、悩んだところですが、なんとかうまくいってやれやれです🎶
初めまして、毎日ブログ見せてもらっています。あもしろい、特に今回のロボットはすごく面白。
返信削除啄童さんと同じように、足首の関節が曲がるところが気になりました、曲がる関節を付けた理由が気になりました。理由は①鉄板から磁石が離れやすくするため、②スムーズに垂直面を上るため、③その他の理由から? よかったら教えてください。私も趣味で木のおもちゃを作っています。私の場合電気に弱いため、電気なしの超アナログのおもちゃですが。姫路の玩具博物館にもよく見学に行っています。
木のおもちゃ工房「あおむし」さん
削除はじめまして。blog見て下さってありがとうございます。
足の関節部分は、Brainergiserさんのアイデアを元に作ったので、えらそうなことは言えないですが、
以下私の想像ですが、
①関節をつけず、木材の斜め45度に切ったところに直接磁石を埋め込んだ場合
恐らく、直進は出来ると思いますが、直角に曲がるときに磁石がうまく鉄板に貼り付かず、コーナーを曲がり切れないと思います。
②今回のクリアファイルを硬い素材に変えた場合
直進部分でも、モーターに負荷がかかり、止まってしまうことも考えられます。
以上の想像からして、木のおもちゃ工房「あおむし」さんのおっしゃる
②スムーズに垂直面を上るために該当するような気がしています。
クリアファイルの長さをもう少し長くしてみましたが、
この場合は、隣同士の磁石がくっついてしまってうまくいきませんでした。
車輪の大きさをもっと大きくすると、大きなトルクが必要になるので、うまく磁石を引き離せないこともありました。
いろんな条件の兼ね合いがあって、難しくもあり、面白みもありといったところですね・・・
姫路の玩具博物館にもよく見学に行かれてるのですね・・・
今、ネットで調べると、九州にお住まいなのですか?
全国大会の「青少年のための科学の祭典」にも毎年参加されてるとのこと・・・すごいですね🎶
chieさん バッチリの回答ありがとうございます。試行錯誤してこの形になった。同じモノづくりをしている者として、その経過が容易に想像できます。今後も改良して行かれるものと思いますのでブログで、また紹介して下さい。既製品の空中ゴマがうまく浮上せず、空中ゴマのことを検索中、chieさんのブログにたどり着きました。ブログを見て手作りする方法があったと気づかされました。いつ完成するか?ですがチャレンジしてみたいと思っています。難しそうだけど・・
返信削除木のおもちゃ工房「あおむし」さん、お返事下さってありがとうございます。
削除この装置は、今後の改良はなく これで終わりかも知れませんが、
ぜひまた何か別のものを作ったらぜひ見てやって下さいね。
空中浮遊ゴマに挑戦されてるのですね。
私の方も、かなり難航し ようやく浮いたときは手が震える感じでした。
一度浮き始めると、数回連続して浮くのですが、下の磁石が微妙にずれると、
浮かなくなり、またその調整に1時間くらいかかったりした記憶があります。
結構難しい分、うまく浮くと嬉しいですね。
これからも、同じモノづくりのお友達として、何卒宜しくお願いします。
chieさん、またまた楽しく素晴らしい作品ですね。丁寧で、詳しい説明を読んでいると自分でも!!と思ってしまうくらいです。でも、木材を使うことは位置決め、穴あけ等で大変な思いをすることがありますし、しなりを利用した部分などはその加減を感触で決めるわけですから、尚更のことですね。尻尾の工夫は見事だと思いました。コーナーでの足の固定と尻尾のおさまり方なんとも言えないです、いい感じです。
返信削除渡辺聰明さん
削除見て下さって、コメント下さって ありがとうございます。嬉しいです。
私が参考にさせてもらった、Brainergiserさんの作品では、車輪部分は塩ビ製でしたが、
加工が困難と思い、木材にしました。木材の加工も下手で、いつも困難ですが・・・
塩ビだと、接着に困るような気がするのです。
Brainergiserさんはホットボンドでうまく接着されてましたが、
どうも、夏場 暑い部屋に置いておくと、はがれやすくって・・・
(なんぼほど、暑い部屋やねん!? (笑))
なるべくなら、ネジ留め出来れば・・・と思って木材にしました。
尻尾部分は、私のアイデアでしたが、うまくいったときは嬉しかったです🎶