小さなソーラーパネルがくるくる回るおもちゃを
時々見かけるようになりました。
調べてみると「solar mendocino motor」と言うそうです。
mendocinoについて、いつもお世話になってるY野さんが調べて下さりました。
mendocinoについて、いつもお世話になってるY野さんが調べて下さりました。
"The name comes from the location of his
workshop on the Mendocino coast of California."
が由来だそうです。
しかし、このおもちゃ あまりにも高すぎて(ほぼ1万円以上)
購入出来ないので、作ってみることに・・・
(1枚バージョンは市販品では見かけませんが、手軽に作れて仕組みもわかりやすいです。)
(1枚バージョンは市販品では見かけませんが、手軽に作れて仕組みもわかりやすいです。)
<1枚バージョン>
36秒目あたりから電車が見えます。
(電車の走る風景を載せるために映像後半が長くなってしまいました。
その割に電車が小さくってよくわからないけど・・・(^^;)
~~~~~~~~~~~~~~~~~~~
(電車の走る風景を載せるために映像後半が長くなってしまいました。
その割に電車が小さくってよくわからないけど・・・(^^;)
~~~~~~~~~~~~~~~~~~~
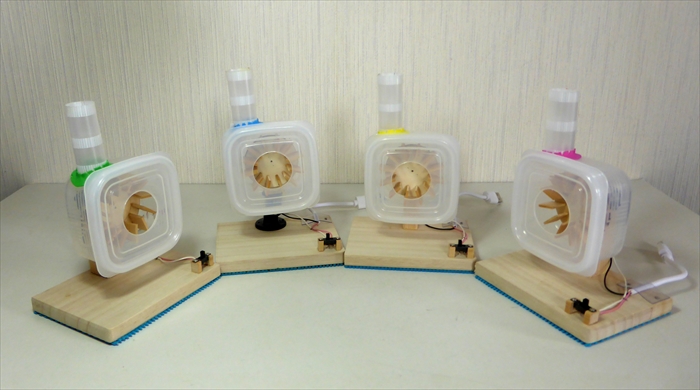
<4枚バージョン>
1枚バージョンは
ソーラーパネルに光が当たるときと当たらないときを繰り返すことで
4枚バージョンは
光が当たるソーラーパネルを入れ替えることで
うまくスイッチングできて、回転し続けることが出来ます。
ソーラーパネルは全て、53X18 (0.5V 100mA) を使用しています。
<1枚バージョンの作り方>
①
φ0.1mmのUEWを径15mm程度のものに200回巻き、
巻き始めと巻き終わりをソーラーにハンダ付けします。
さらにパネルの上下に針を固定しています。
(針はまずエポキシ系接着剤でパネルに固定してから黄色と赤色のシールを貼っています。)


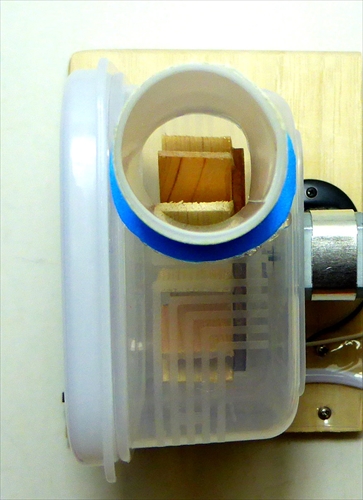
②
ワイヤー(洋蘭支柱の被覆をはがしたもの)をU字型に曲げ、
上の方にφ4mm×2mmの磁石を貼っています。
下の方はφ3mm×10mmのパイプを板に埋め込み、
後ろに柱を立てて、φ13mm×3mmのネオジム磁石を貼りました。

③
①の下の針を②のアルミパイプに通し、上の針をU字型の磁石にくっつけます。
下の針は地面にはつかないようにします。
針が上の磁石にくっついてぶら下がっている状態です。

映像のように左右から光を当てると回転します。
正面から光を当てても回転しますが、左右から当てた方が回転しやすいと思います。
<4枚バージョンの作り方>
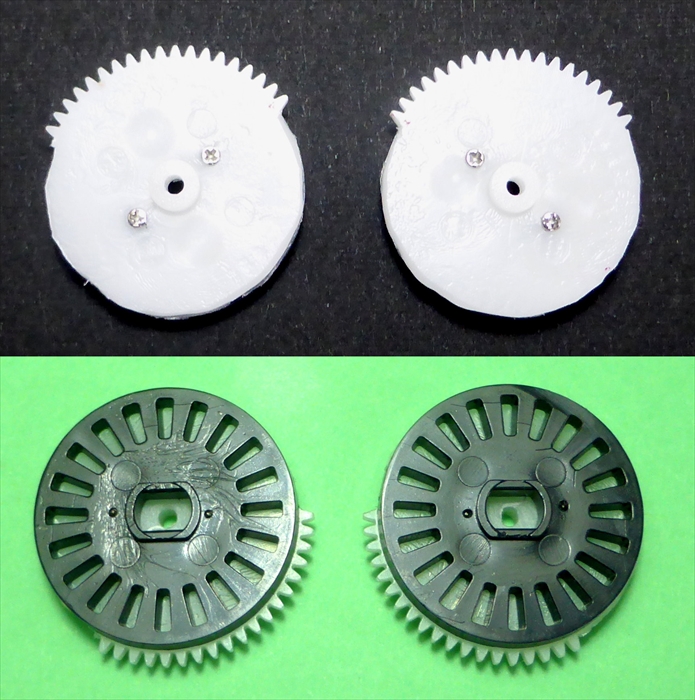
①
2cm角の木材の中心に穴を開け、φ4mm×70mmのパイプを通し
パイプの先端には釘の先の方をカットして接着しています。

②
φ0.1mmのUEWを400回巻きました。

③
②と直交するように、φ0.1mmのUEWを400回巻きました。
(②のUEWとは接続していません。)

④
パイプの上の方に取り付け金具を4つ取り付けた正方形の板を固定しています。

⑤
④の取り付け金具にソーラーを貼ったところです。

ソーラーとコイルの接続は下図のように
向かい合わせのソーラーのプラスとマイナスを接続し、
その中間にコイルの巻き始めと巻き終わりを接続。
直交するコイルも同様にします。(極性を合わせる。)

この接続方法はこちらの動画を参考にさせて頂きました。
⑥
土台には洋蘭支柱を曲げたものを2本固定し、
支柱の上の方にφ6mm×3mmの磁石を貼り付けています。
下の磁石は向かい合わせにそれぞれφ15mm×5mm×2個を取り付け金具に貼っています。
極性は片方はN極、もう片方はS極が内側を向くようにします。
磁石の間に銅の針金を立てています。(その後 銅くぎに変更。)

⑦
日の当たらないところでも実験出来るように
支柱の左右にLEDライト(COB(チップオンボード)型)も取り付けました。
支柱の左右にLEDライト(COB(チップオンボード)型)も取り付けました。


⑧
⑤のパイプの下に⑥の針金を差し込み、
釘の頭を上の磁石にくっつけてぶら下げます。
ライトを光らせる電源にはモバイルバッテリーを使用しています。

<回転方向の考察 ~1枚バージョン~>
ソーラーパネルに光が当たるとコイルに電気が流れます。
ソーラーパネルと磁石の位置関係は下図のようになっていて、
磁石に近いコイルには電磁力が働き、回転をします。
ソーラーパネルが裏向きになったときには、コイルに流れる電流は少なくなり
ソーラーパネルが裏向きになったときには、コイルに流れる電流は少なくなり
電磁力はほとんど働かず惰性で回ります。
(もし裏向き状態でも光が当たってコイルに電流が流れると、
逆向きの電磁力が働き回転し続けることは出来ない。)
(もし裏向き状態でも光が当たってコイルに電流が流れると、
逆向きの電磁力が働き回転し続けることは出来ない。)

<回転方向の考察 ~4枚バージョン~>
磁石は土台に固定され、パネルとコイルが回転する状態です。
(パネル+コイル)は同じものを2組、直交した状態で配置していますが、
下の図は1組分で考えています。
光の当たったソーラーパネルの方から多くの電流が流れ、
両側の磁石によりコイルに電磁力が働き(パネル+コイル)が回転します。
(パネル+コイル)が半回転すると、パネルは入れ替わりますが
パネルと磁石の位置関係は同じなので
パネルと磁石の位置関係は同じなので
同じ方向に回転します。(コイル内の電流は常に変化している。)